Scroll Down
Scroll Down
Scroll Down
THE CHALLENGE
Designing the interface and process to drive the FIRST American Lunar Robot

Project Team
Designed for : Iris Lunar Rover Design Team
My Role : Lead Concept of Operations Testing and collaborated on the interface design
Done in collaboration with : Iris (formerly CubeRover) Teleoperations Team
About Iris
Iris Lunar Rover is a 2 kg rover that is tentatively set to launch in 2022. The primary mission objective of the rover is to conduct small scale science missions and make such missions more easily accessible through its low budget and lightweight design. Upon successful deployment on the Moon, Iris will be the first American Lunar Robot, Nano Lunar Rover and University Built Rover on the Moon.
DEFINING THE DESIGN GOALS
How do we define and provide the information needed to operate a rover on the moon?
In the fall of 2018, Iris Lunar Rover (then known as CubeRover) was early in its stages of becomming flight qualified for its mission on the moon. Though several engineering models were completed at this point, there had been no work done on any of the control interface or strategizing of mission operators. It was to this regard that my role upon entry of the team was to define a driving interface and chain of command strategy for executing tasks on the rover.
To begin this task I first went to the drawing board to explore three critical questions :
1. WHAT
is the information relay of data going in and out of the rover?
2. HOW
does that information contribute to the execution of driving tasks?
2. WHO
shall oversee and execute a driving task?



TESTING DESIGN DEFINITIONS AGAINST USERS
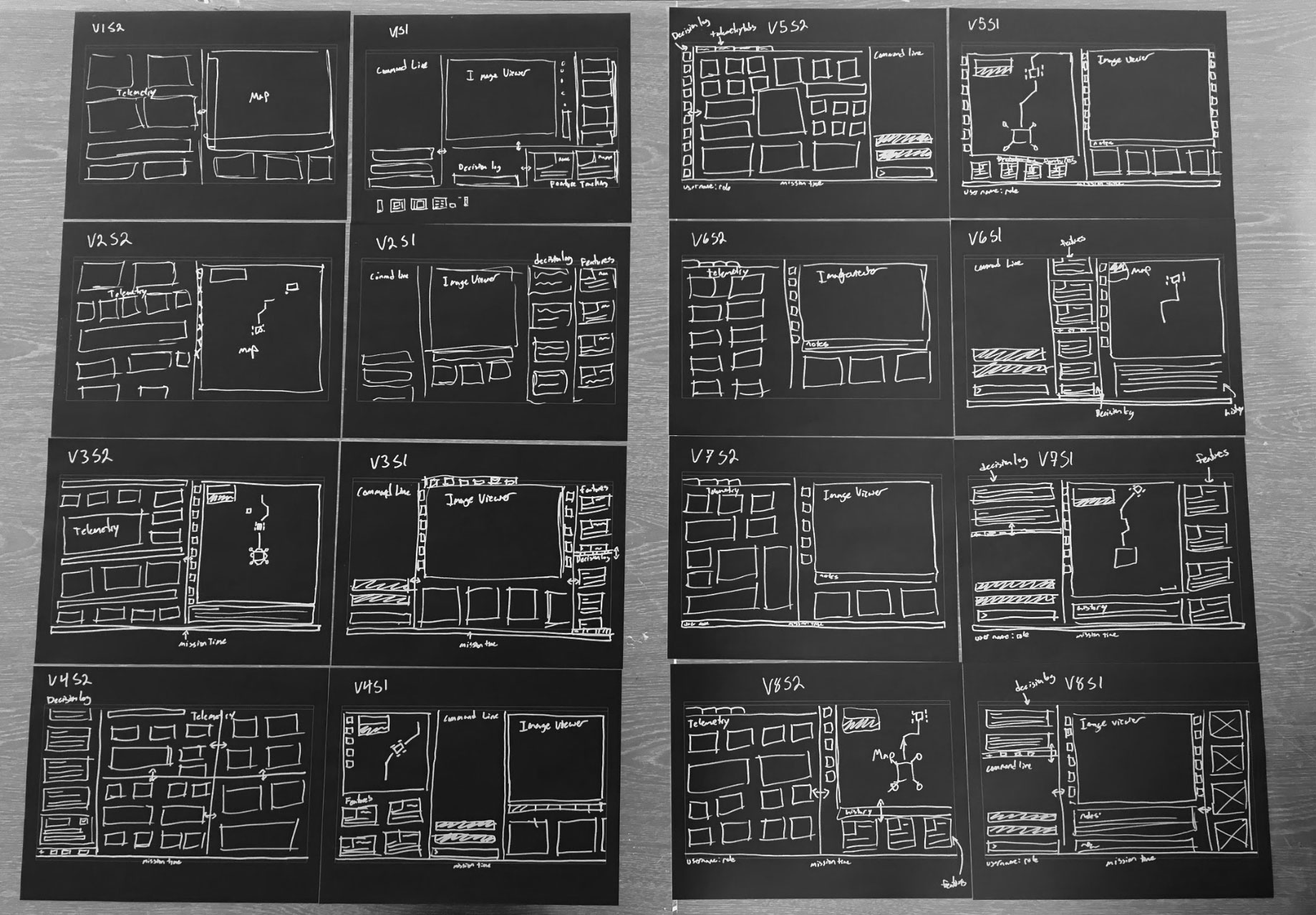
Defining a mission timeline for operating the rover through testing
Once we had defined our first iteration of flight operators and hypothesized what data each operator would need, we began to conduct "Paper Missions." These testing periods consisted of running mock mission simulators and gathering engineers on the team to act as our flight operator personas. For the first round we began with sheets of paper and notes with different data types written on them. As parts of the mission progressed, we would present different notes and observe how the operators reacted.
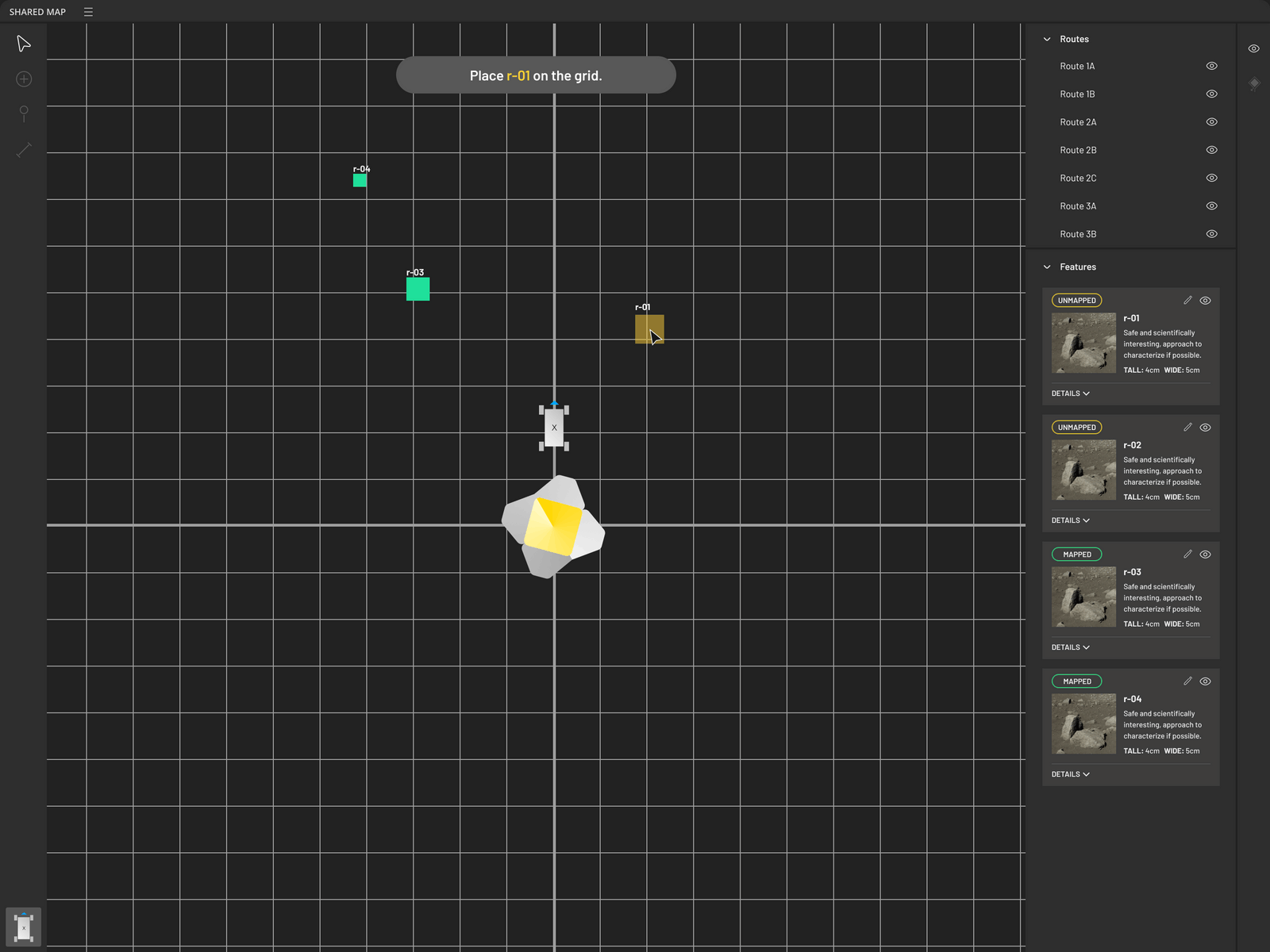
THE INFORMATION RELAY
Defining the operational strategy that will ground the interface
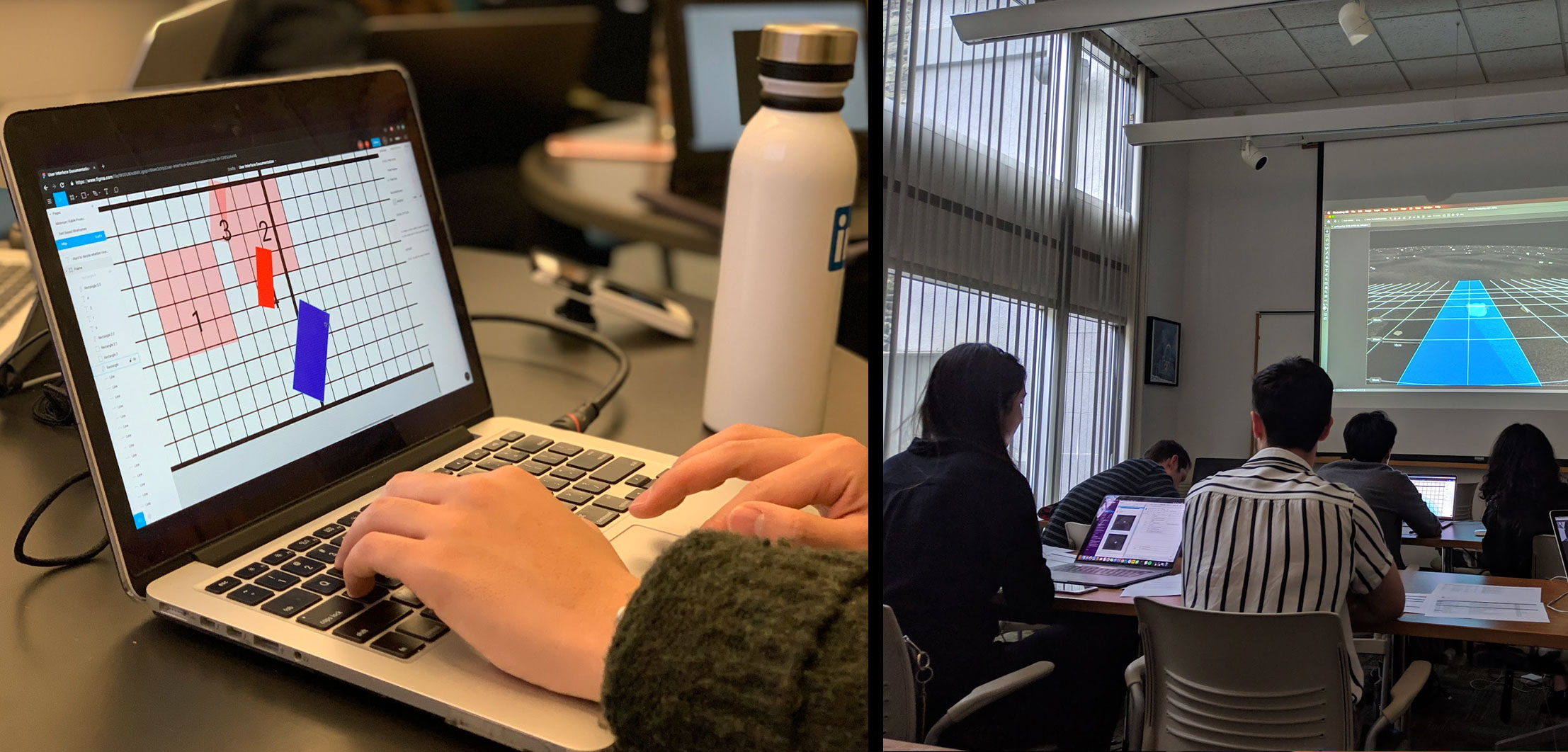
TESTING WITH PROTOTYPES
Bringing the UI to life
Once we had a sense of both the operators needed and an operational strategy in place, we then went to start bringing the UI to life and testing those within our Concept of Operations Testing. These testing points consisted of us testing our prototypes against simulated missions.
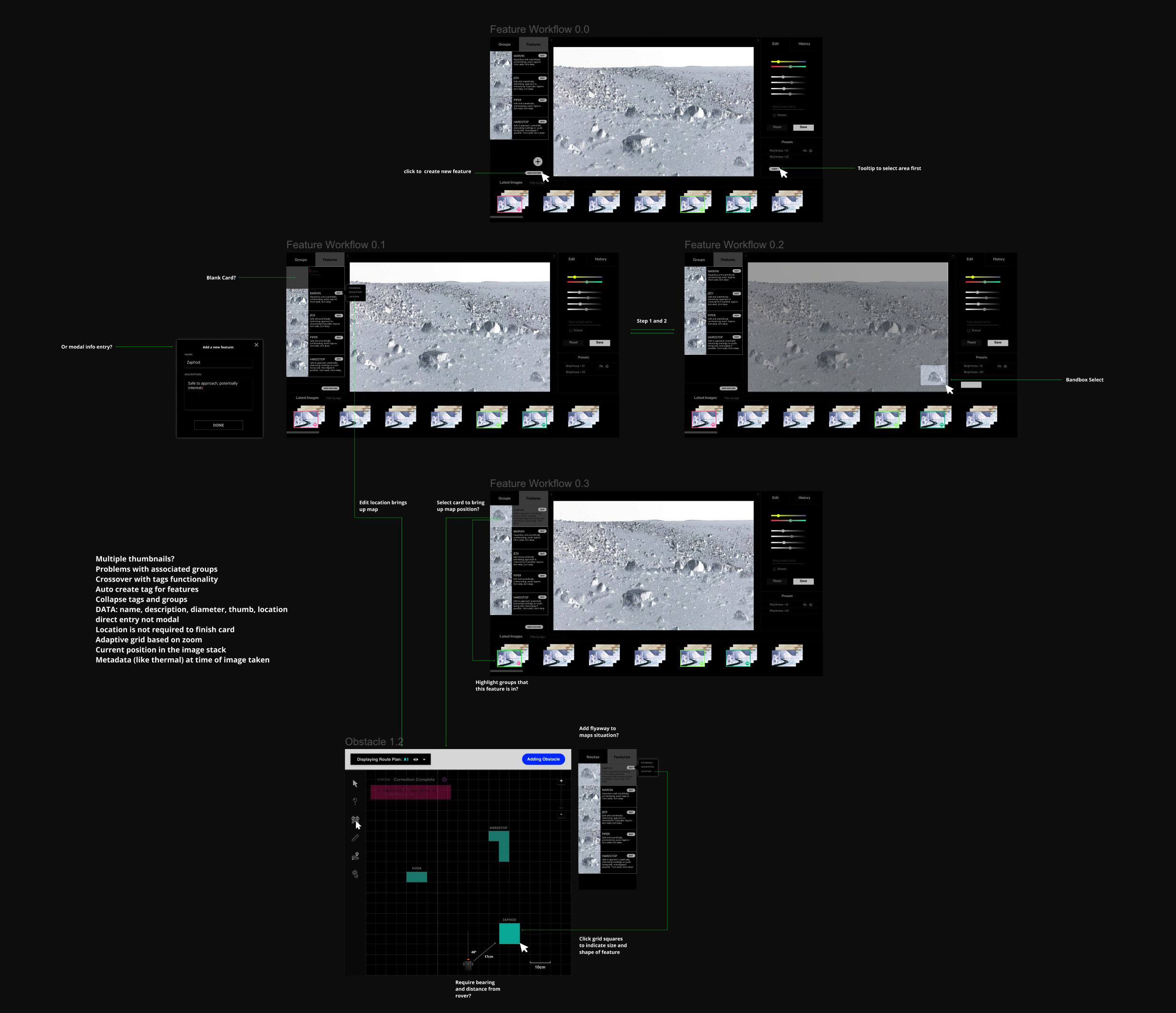
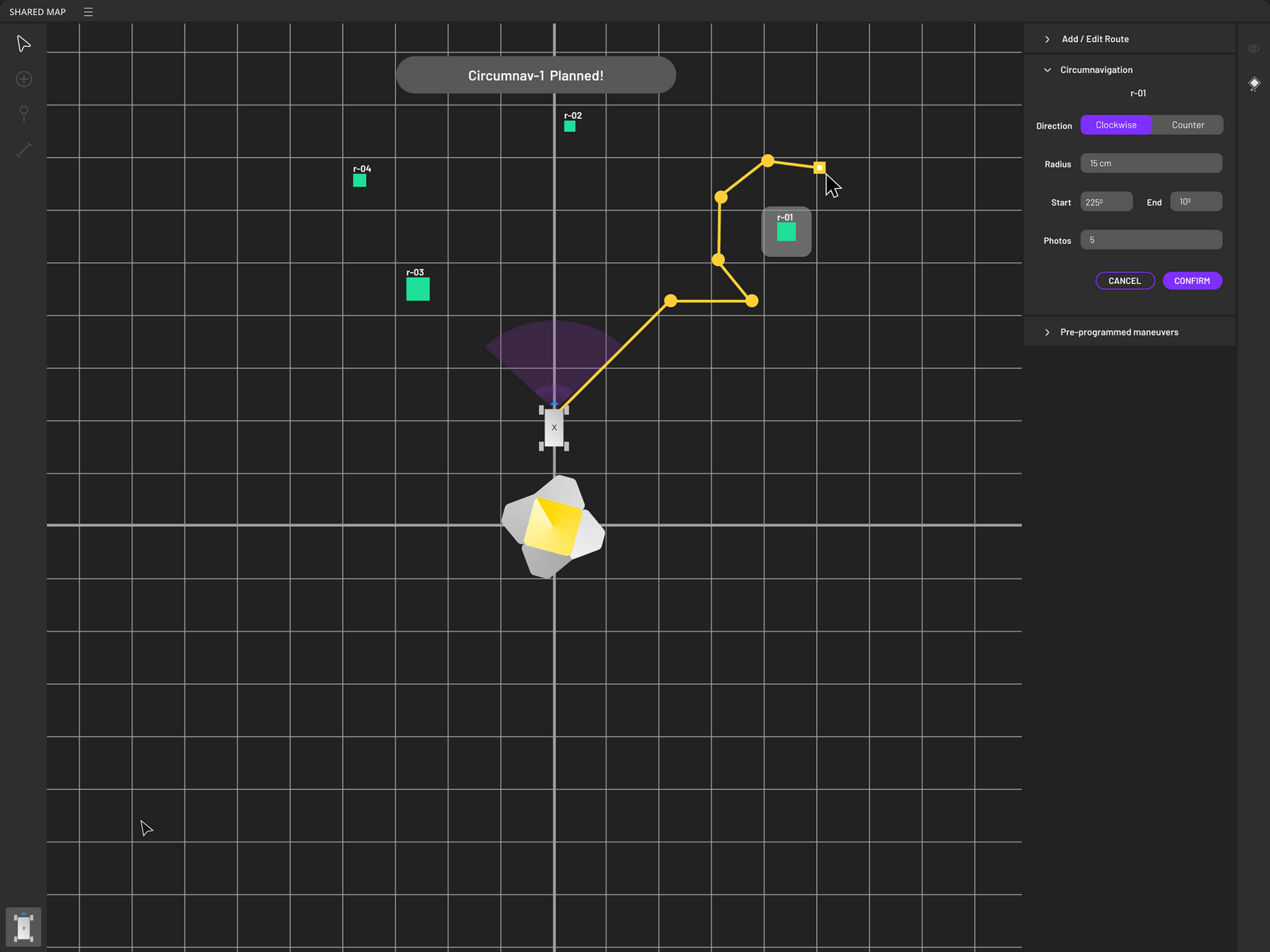
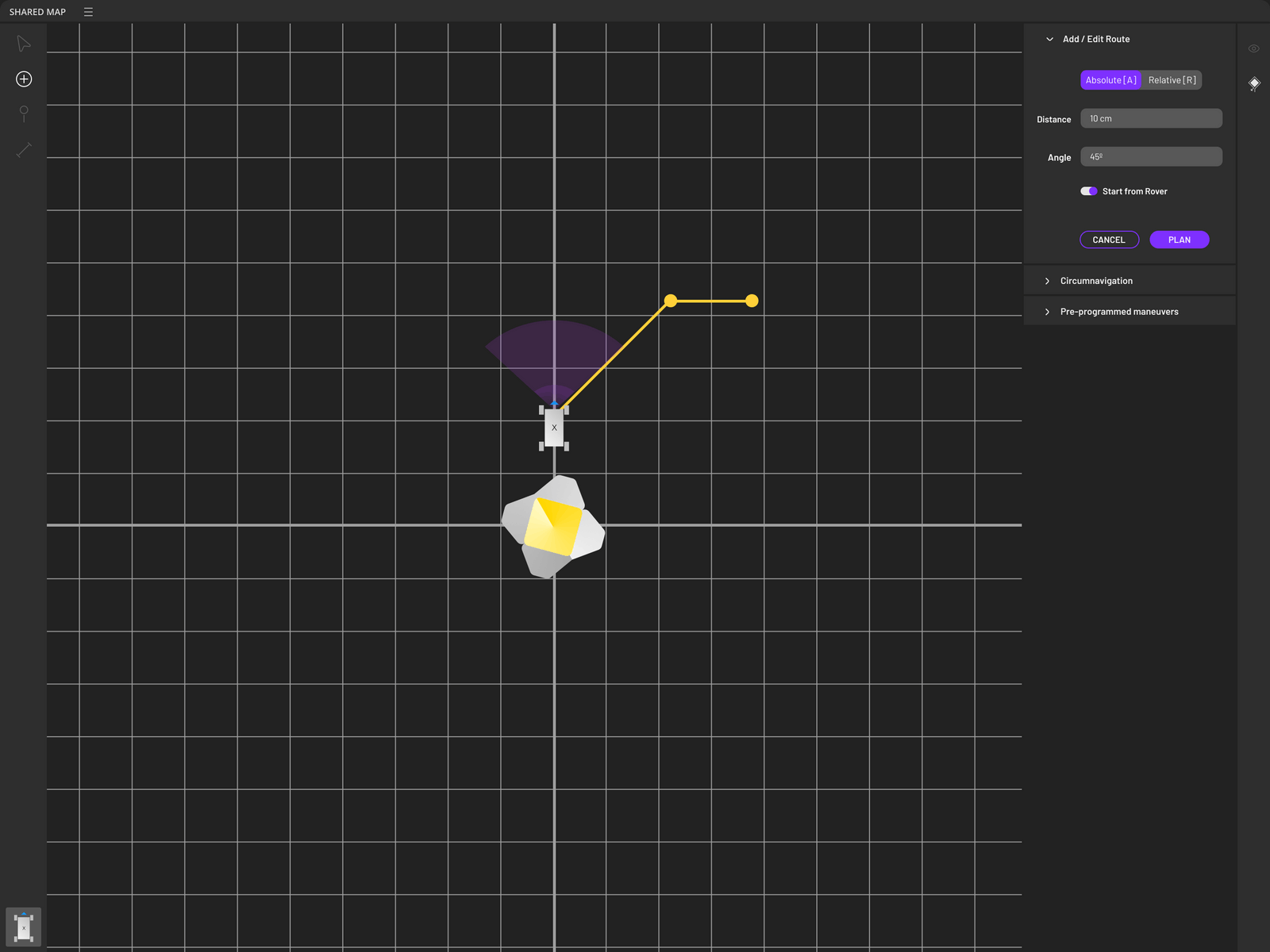
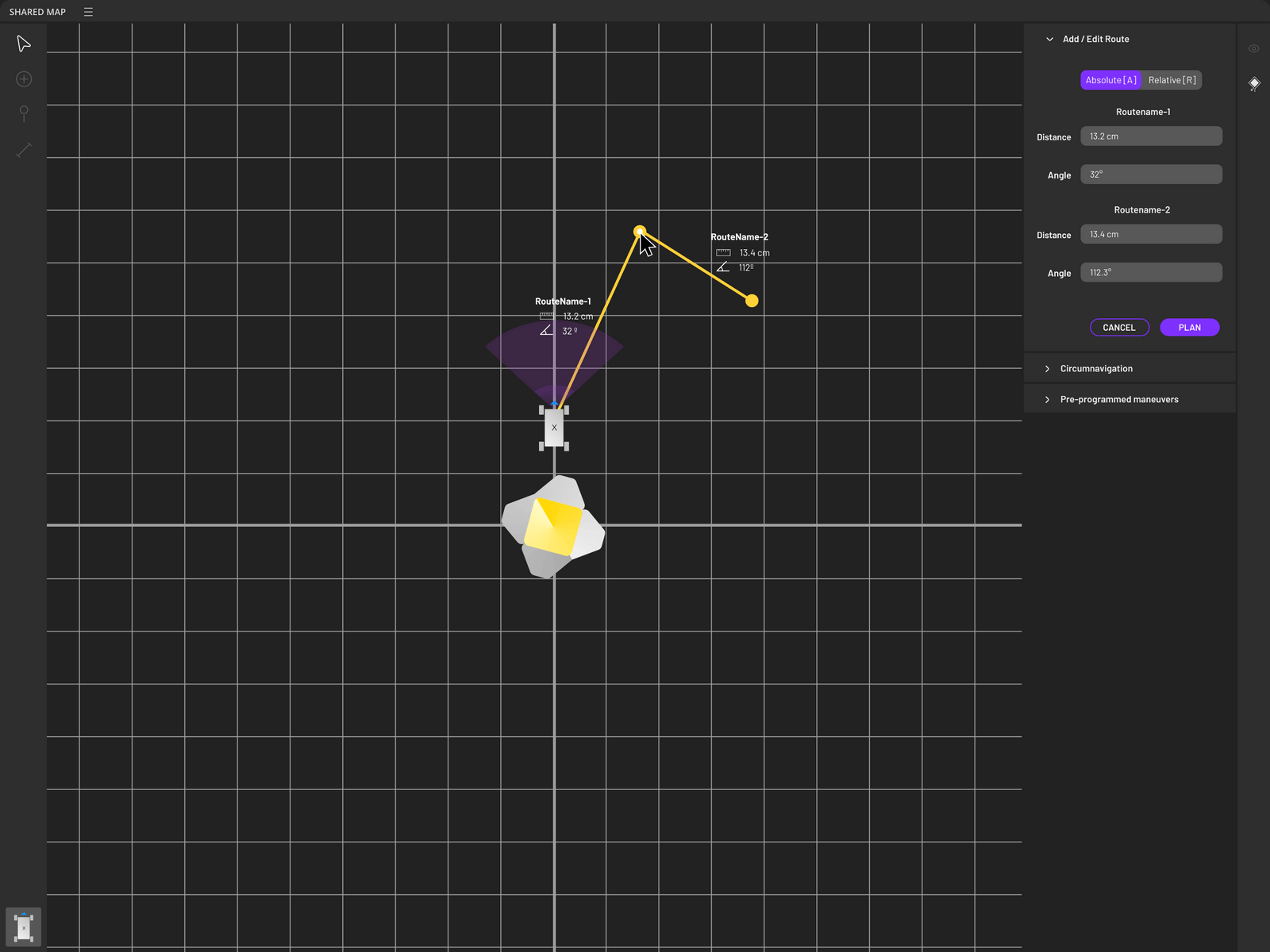
FINAL DESIGN FOR PHASE ONE
A UI that allows the rover to navigate and capture a terrain during a mission
After each testing session we continued to iterate upon our design prototypes. Once we established an overall system for what information needed to be on each operator's dashboard, we then settled on a higher fidelity set of screens to serve as the primary driving UI for testing the rover engineering models and practicing mission operation procedures. The final UI for operating the rover at mission is still in progress and builds upon the UI developed for this phase.